ST-Net: Scattering Topology Network for Aircraft Classification in High-Resolution SAR Images
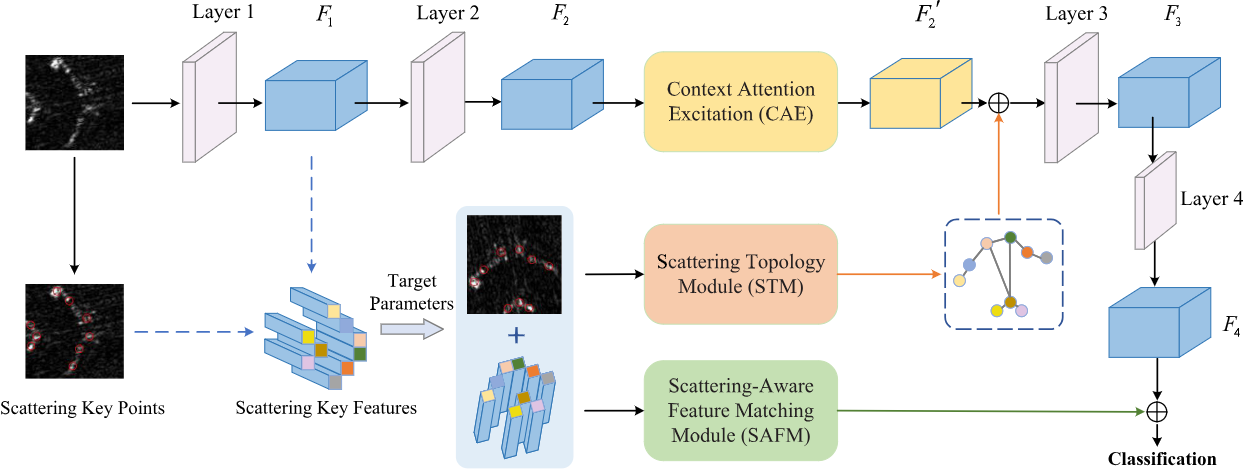
本文提出了一种名为 ST-Net 的新框架,用于在高分辨率 SAR 图像中进行飞机分类。该网络利用飞机散射特性,构建基于图的拓扑关系。
该方法包括以下几个核心步骤:
散射感知特征匹配 (SAFM):
提取与转换:首先,从原始图像中提取散射关键点,并从特征图中获取相应的散射关键特征。然后,结合目标姿态角和分辨率等参数,将散射关键点的坐标转换到标准状态,公式如下:
xi=(xi−xcenter)×cos(π/180×θ)/η−(yi−ycenter)×sin(π/180×θ)/η+xcenter/ηyi=(xi−xcenter)×sin(π/180×θ)/η+(yi−ycenter)×cos(π/180×θ)/η+ycenter/η
其中 (xi,yi) 是第 i 个散射关键点,(xcenter,ycenter) 是图像中心坐标,θ 是目标姿态角,η 是分辨率。
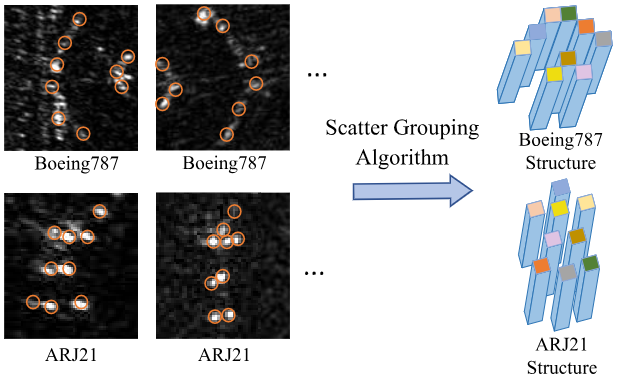
分组与匹配:设计了一种新的散射分组算法,根据坐标位置将散射关键点分为不同的簇中心,并在线更新散射模板,以突出不同类别之间的差异。该算法的目标是找到每个类别 m 的分组 Cm,最小化以下目标函数:
L=m=1∑Mi=1∑Nρ∈Cmi∑∣∣ρ−ψmi∣∣22
其中 M 是类别数,ψmi 表示第 m 类的第 i 个散射分组组件信息,ρ=(x,y) 表示转换后的坐标。使用余弦相似度计算测试图像的散射特征 F^s 与各类散射中心特征 Zs 之间的相似度得分,用于最终分类。
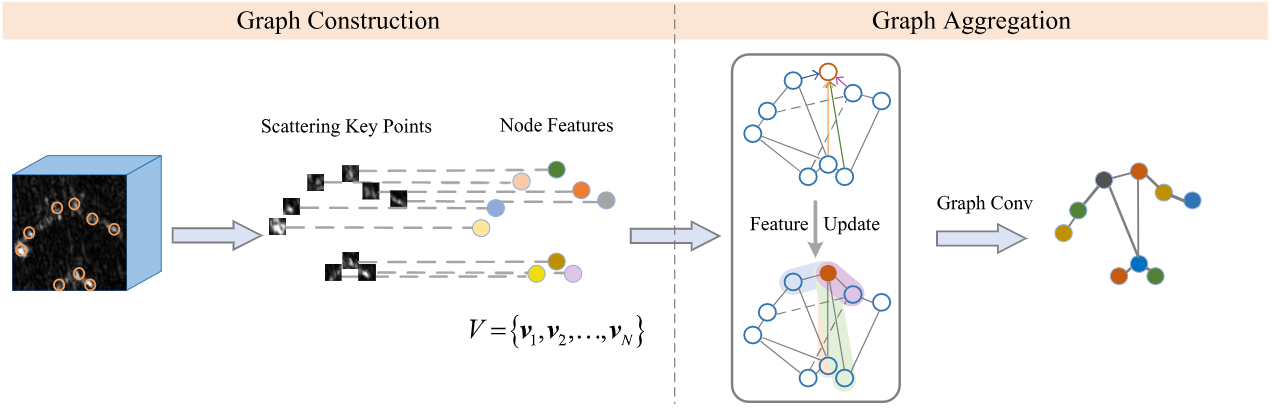
散射拓扑模块 (STM):
图构建:将离散的散射关键点定义为拓扑节点 V={v1,v2,...,vN},节点之间的空间关系定义为拓扑边 eij∈E,∀i,j∈{1,...,N},其中 eij=1。利用图 G={V,E} 对输入散射关键特征 Fs 的空间关系进行建模。使用极坐标函数 γ(i,j) 反映节点 i 和节点 j 之间的空间连接:
γ(i,j)=(ρij,φij)ρij=(yj−yi)2+(xj−xi)2φij=arctan(xj−xiyj−yi)
使用 K 个高斯核作为加权算子,其中可学习的均值向量 μk 和协方差矩阵 Σk 计算如下:
wk(γ(i,j))=exp(−21(γ(i,j)−μk)TΣk−1(γ(i,j)−μk))
高斯核 wk(⋅) 表示散射关键点的空间信息,是加权邻接矩阵 A 的条目值。
图聚合:使用图卷积传播并更新邻居节点特征。给定散射特征输入 vj∈V 和高斯权重 wk(γ(i,j)),节点 i 的表示通过其邻域聚合:
z^k(i)=j∈Neighbor(i)∑wk(γ(i,j))vjeij
其中 z^k(i) 是邻居特征的加权融合。获得 K 个特征后,执行特征融合得到 z^i=∑k=1Kz^k(i)。特征 z^i 经过线性变换 L 以获得转换后的特征 hi=L(z^i)。