STC-Net: Scattering Topology Cue-Based Network for Aircraft Detection in SAR Images
散射特征点提取
首先通过平均 (5 \times 5) 滤波器处理图像,以减轻斑点噪声的影响。其次,考虑到飞机各个部分的散射特性,我们使用不同的方法提取散射点。对于主要涉及边缘包裹的机翼和尾翼,采用 Canny 算法提取边缘信息。相反,对于主要包含二面角和三面角反射的机头和发动机,则利用 Harris 算法提取角点信息。如图 3(b) 所示,飞机的散射点主要由上述两种类型的点组成。提取范围被限制在训练期间的ground-truth bounding box内,这有助于消除不必要的干扰,例如来自终端的干扰。在抑制这些高强度干扰后,飞机目标被突出显示,从而有助于提取角点和边缘信息。最后,通过 k-means 聚类算法获得中心点
设计了一个 scattering keypoints prediction branch (SKPB) 去预测特征点
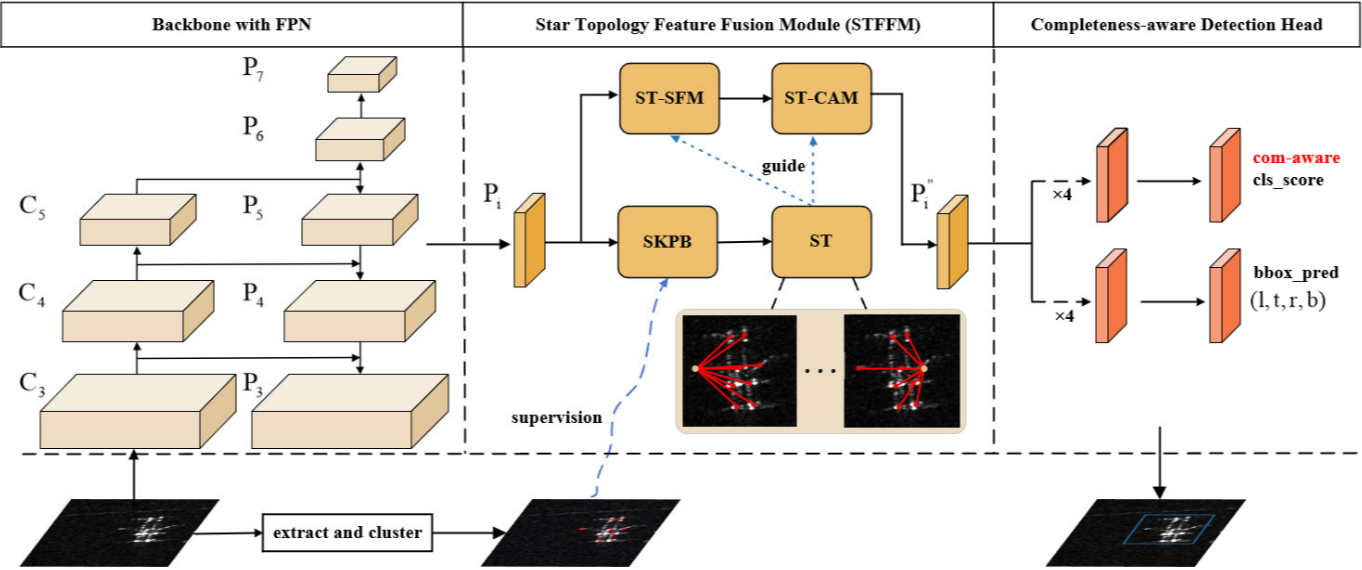
结合包含在 scattering keypoints 中的结构信息以获得更具区分性的特征非常重要。在每个 scattering keypoint 处,我们构建一个以其为中心的 ST 以重新表示飞机,如图 4 所示。受 VarifocalNet [64] 中提出的星型框的启发,所提出的 ST 基于 scattering keypoints,反映了飞机的结构特征。基于此,提出了 STFFM,其中包括 ST-SFM 和 ST-CAM。
本文提出了一种基于散射拓扑线索网络 (STC-Net) 的SAR图像飞机检测方法,旨在提高飞机识别率和预测结果的准确性。该方法的核心思想是利用星型拓扑 (ST) 对飞机进行建模,强调飞机的重要组成部分(如机头和机翼),并将这些离散的散射中心连接成一个整体。
核心方法:
-
星型拓扑 (ST) 建模:
- 将飞机建模为ST,其中节点代表飞机上的关键散射中心,如机头、机翼和引擎。
- ST不仅强调了这些关键组件,还将它们连接成一个有凝聚力的单元。
- ST包含节点信息(构成ST的实体的属性)和邻域信息(节点之间的空间关系)。节点位置集合表示为 ,其中 表示节点的二维坐标。
-
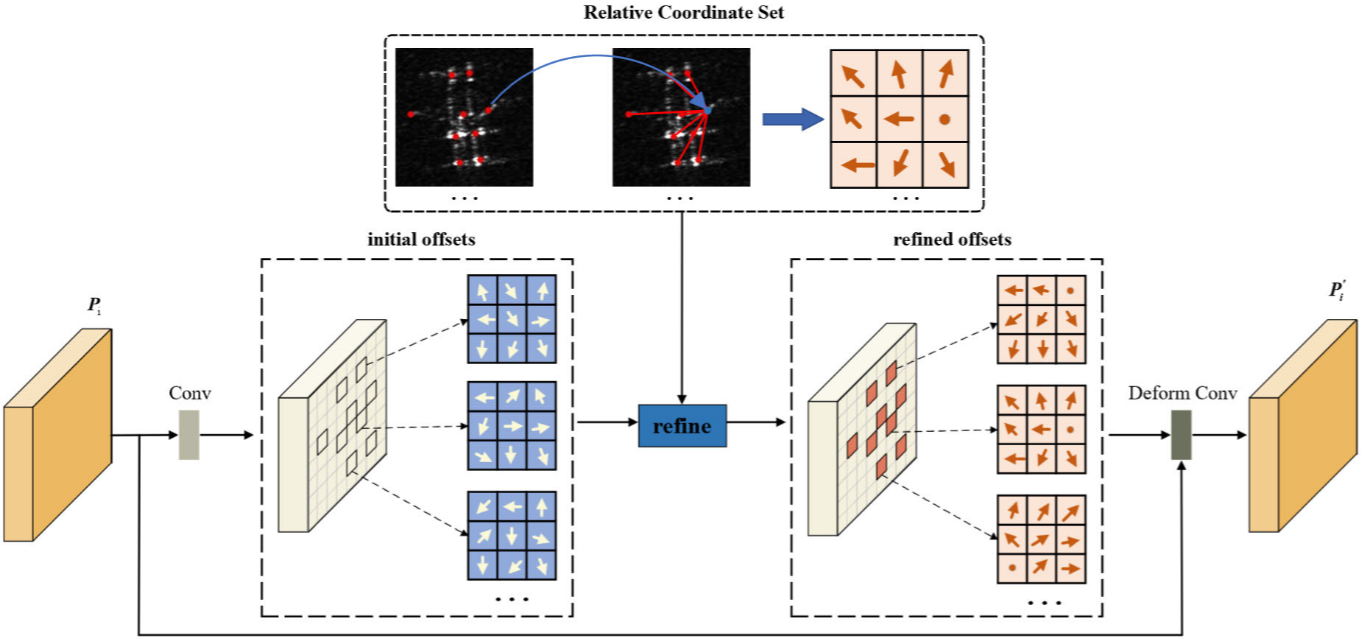
ST空间融合模块 (ST-SFM):
- 利用ST的邻域信息动态聚合离散的散射中心,以恢复更完整的飞机特征。
- 使用可变形卷积 (DC),并利用ST的邻域信息来调整DC的偏移量。
- 具体步骤:
- 初始偏移量: 通过3x3 和 1x1卷积操作得到初始偏移量。
- 计算相对坐标: 对于节点, 其他散射关键点的相对坐标为
- 细化初始偏移量:使用相对坐标来细化初始偏移量。
- 可变形卷积: 基于细化的偏移量在特征图上进行DC操作,得到.
- 节点数目M等于卷积核大小的平方。卷积核通常大小为3,所以M设为9。
-
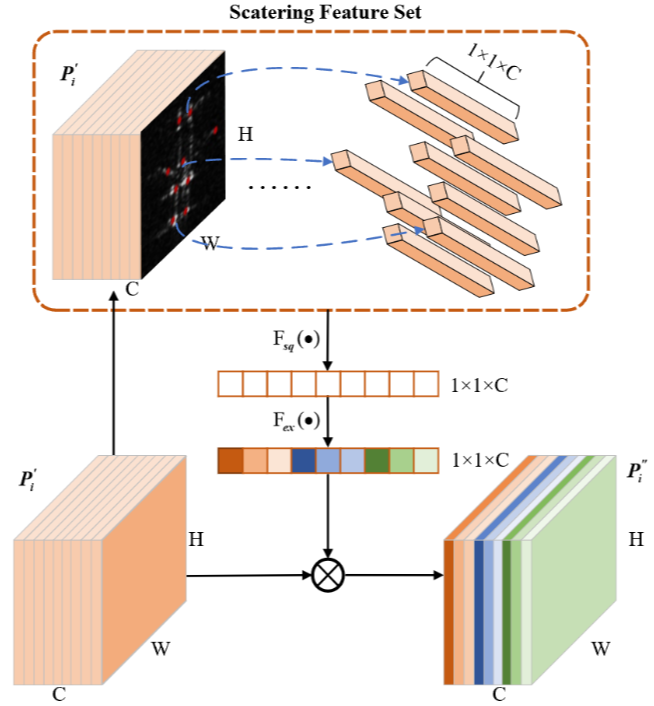
ST通道注意力模块 (ST-CAM):
- 利用ST的节点信息来增强飞机显著性,抑制背景干扰。
- 基于ST的节点信息生成通道描述符,从而突出飞机特征。
- 具体步骤:
- 获取节点位置集合。
- 基于节点 的二维坐标, 从中获得特征向量 , C为的通道维度。
- 融合所有节点信息,获得融合特征 : 其中,表示连接操作, 表示平均池化操作。
- 捕捉通道间依赖关系,得到通道注意力: 其中,表示全连接层,表示ReLU函数。
- 通过缩放,得到最终ST-CAM的输出:
其中,表示和之间的通道乘法。
-
完整性和一致性损失 (CCLoss):
- 包含完整性感知标签和正样本加权函数。
- 完整性感知标签:结合IoU和散射关键点置信度,更准确地描述定位精度。公式为: 其中,是类别标签,是散射关键点置信度,是预测框和真实框的交并比,是一个调节参数。
- 正样本加权函数: 增强分类和定位分支的一致性。公式为: 其中, 表示一致性得分,是预测概率,是调整因子。
- CCLoss公式:
-
总损失函数:
- 总损失函数包括散射关键点损失 ()、分类损失 () 和定位损失 (): 其中, 是损失调节器。
- 散射关键点损失: 使用Focal Loss
- 分类损失: 使用CCLoss
- 定位损失: 使用IoU损失
实验结果:
- 在Gaofen-3 SAR飞机检测数据集 (GF3ADD) 和公开的SAR-AIRcraft-1.0数据集上进行了实验,证明了STC-Net的有效性和泛化能力。
- 消融实验表明,每个提出的模块都有助于提高模型性能。
- STC-Net在AP50和AP75上优于baseline 3.4%和4.6%。
- 与其他CNN-based方法相比,STC-Net在多个评估指标上取得了state-of-the-art的性能。